自然界中从心肌搏动到昆虫振翅,这些周期性运动通过软体结构与材料的协同非线性力学响应实现了惊人的能效,是生物自主运动的卓越体现。生物内在的负反馈机制启发了软体机器人,将反馈与控制功能内嵌于材料,仅依赖恒定能量输入即可产生无需外部时变信号干预的持续运动。本文将软体机器人自持运动的调控策略划分为六大类别:热驱动、光驱动、光化学驱动、湿度驱动、拓扑结构调控和负反馈回路。这一设计理念减少了对传感器、控制器和电池的依赖,提升了响应速度与环境适应性。然而,软体机器人如何在非结构化复杂环境中实现长时效、高稳健的自主运动,同时突破能量转化效率低等瓶颈,仍是亟待攻克的关键难题。
基于上述背景,江苏大学机械工程学院徐琳教授课题组系统梳理了软体机器人实现自持运动的核心机理,依据上述六大调控策略,将对应运动行为划分为自持振荡、滚动爬行、结构避障、拓扑旋转及非线性轨迹运动五种典型模式。通过从环境适应性、能量转化效率及运动性能维度对比各类机理,搭建起运动策略与环境特征的关联适配体系,并展望了非结构化环境下高性能自主软体机器人面临的核心挑战与未来研究发展方向。该工作以题为“Autonomous soft robotics: Revolutionizing motion with intelligence and flexibility”发表于Elsevier旗下国际权威期刊 《Advances in Colloid and Interface Science》(实时影响因子:22)。
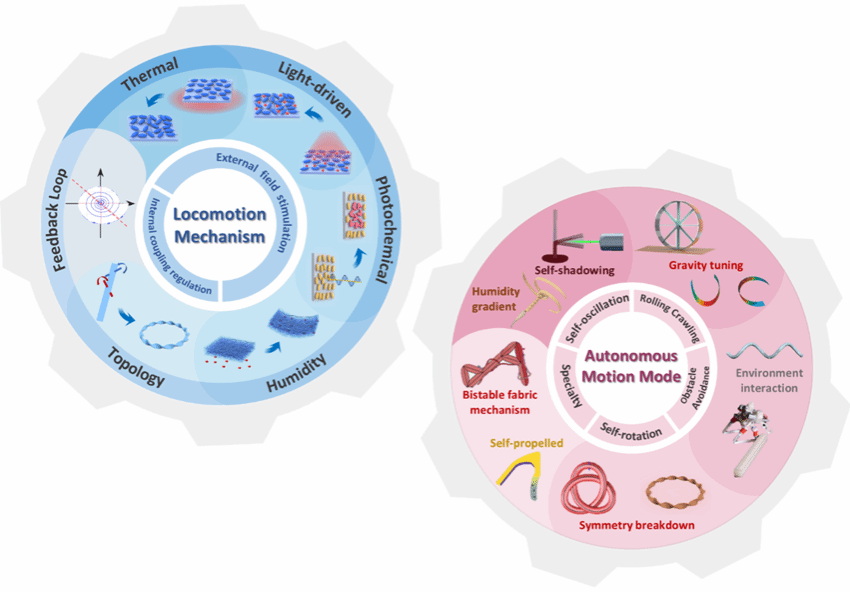
Fig. 1. Overview of the motion mechanism and motion forms of autonomous soft robots.
图1展示了软体机器人自持运动调控策略与典型运动模式分类框架,将现有研究按刺激源与结构特征归为六类自主运动机制,包含热驱动、光驱动、光化学驱动、湿度驱动、拓扑结构调控以及负反馈回路,其中,热、光、光化学与湿度主要对应外部能量输入形式,而拓扑结构设计与内置反馈回路则反映系统内部的耦合与调控机制。在实际体系中,自主运动通常源于外部场输入与内部结构或动力学不对称性之间的协同作用。在运动表现方面,进一步将软体机器人的自主运动归纳为五种具有代表性的行为模式:自持振荡、翻滚/爬行、结构避障、拓扑自旋以及特殊非线性运动,其运动过程通常源于材料响应、结构不对称性或耦合机制所诱导的非平衡行为演化。
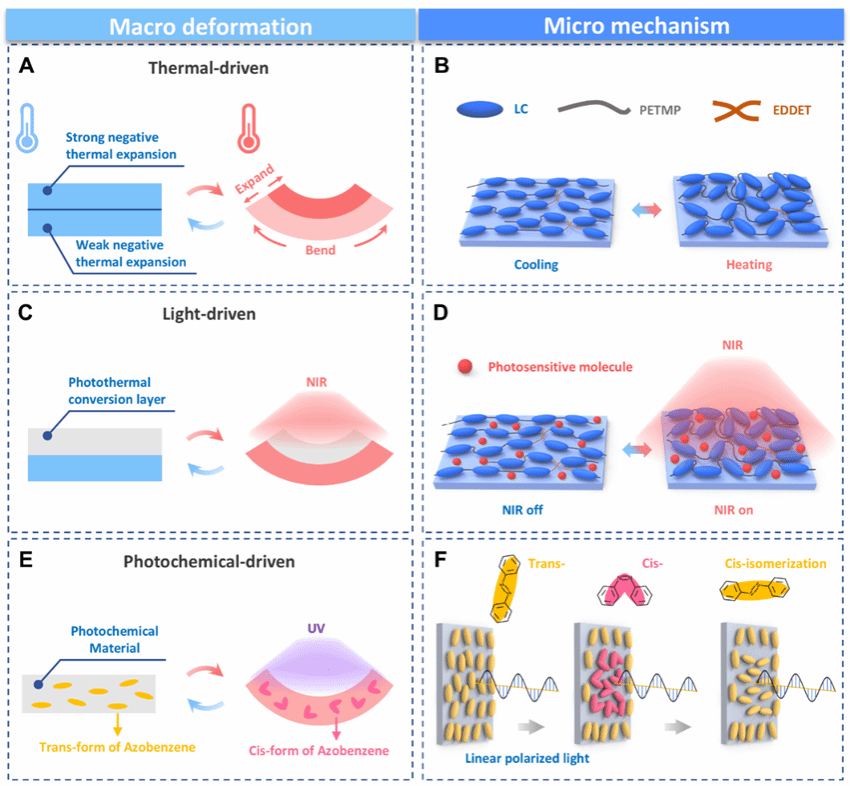
Fig. 2. Macro and micro perspectives of autonomous movement mechanisms.
图2分别从宏观与微观双重视角阐释了软体机器人各类自主运动作用机理。其中A、B分别呈现基于液晶弹性体的典型热弯曲机制宏观形貌与微观结构特征;C、D展示近红外光驱动下液晶弹性体光热弯曲机制的宏观运动形态与微观响应特征;E为光照条件下偶氮苯分子发生顺反异构变化的宏观表现;F则从微观层面揭示了Weigert效应的内在作用机理。
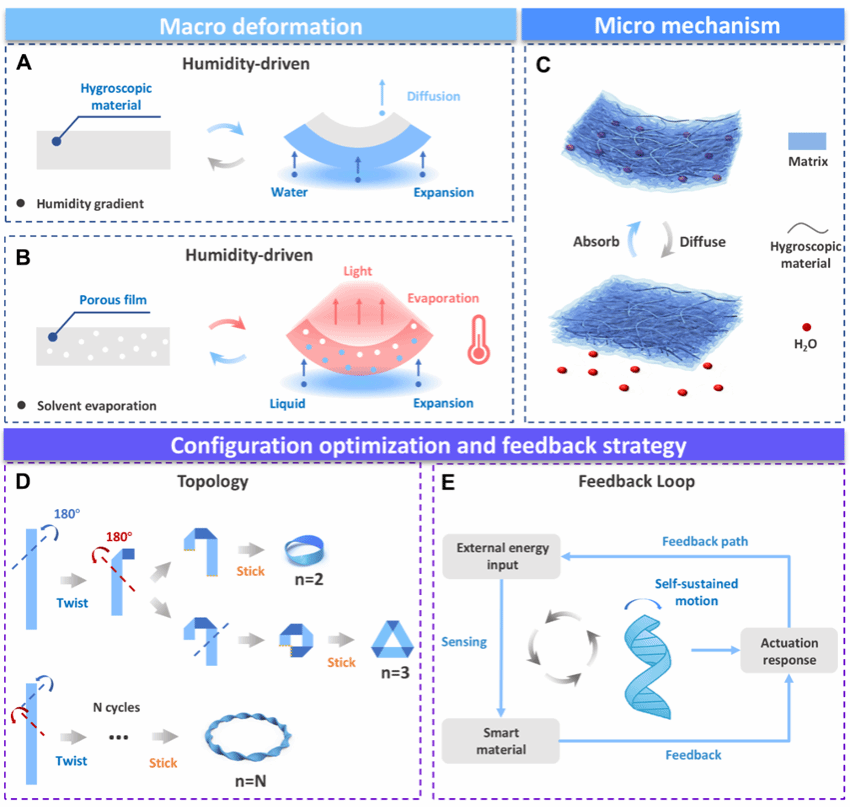
Fig. 3. Macro and micro perspectives of autonomous movement mechanisms.
图3分别从宏观与微观双重视角阐释了软体机器人各类自主运动作用机理。其中A、B分别呈现湿度梯度驱动与溶剂蒸发驱动两种软体机器人自主运动方式的宏观运动表现;C从分子微观尺度,直观展现复合材料基体内部吸湿组分之间相互协同作用的微观作用原理,清晰揭示湿度类驱动运动的响应机制;D重点阐释拓扑结构构型与零弹性势能模式,为软体机器人实现持续自主运动提供结构实现路径;E为软体机器人自主运动的典型负反馈闭环控制模型。
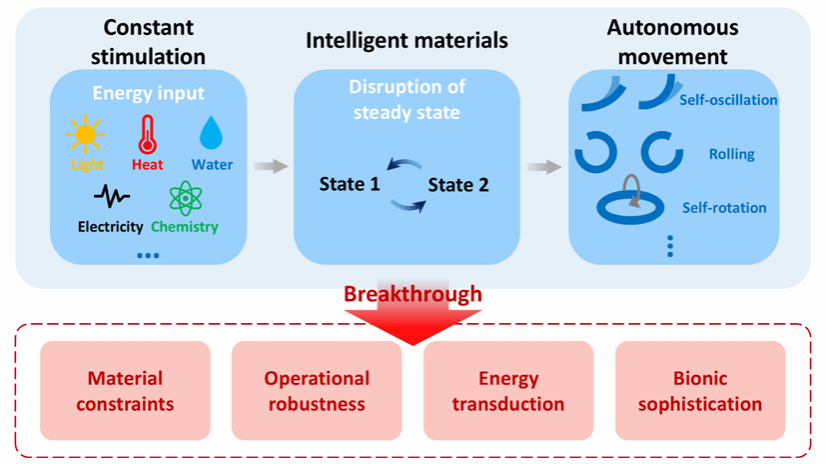
Fig. 4. The current situation and future prospects of autonomous motion soft robots.
图4展示了自主运动软体机器人在恒定环境刺激下,依托智能材料响应实现稳态破坏与自主运动的核心逻辑,清晰呈现光、热、湿度、化学、电场等能量输入与自持振荡、滚动、自旋转等典型运动形式的内在关联。同时,从多尺度材料创新、层级结构设计、高效能量转化、仿生智能提升四大维度,指明了自主软体机器人未来的关键突破方向。
此外,文章进一步总结了自主运动软体机器人的五种具有代表性的行为模式,包括自持振荡、翻滚/爬行、结构避障、拓扑自旋以及特殊非线性运动,并系统梳理了其在陆地、水下、空中及多场景复杂环境下的运动表现与适应能力。作者还指出,面向真正系统级的自主软体机器人,未来需重点突破四大关键方向:多尺度材料创新、层级结构设计、高效能量转化、仿生智能提升。最终,高性能自主软体机器人的研发本质是高度跨学科的创新过程,离不开化学、材料学、力学、物理学、机器人学与生物学等多领域的深度协同。未来的自主软体机器人将可直接利用环境光、热、湿度等天然能量驱动,具备稳定自持运动、多模态切换、环境感知与智能决策能力,并逐步实现群体协同作业,更好满足医疗介入、环境探测、柔性作业、智能装备等实际工程应用的迫切需求。
硕士研究生刘博宇、张立志是论文的共同一作,徐琳教授为通讯作者,扬州大学丁建宁教授、深圳大学王奔副教授为论文的共同作者。该项工作得到了国家自然科学基金(52275290、52475308)、机械系统与振动国家重点实验室研究项目(MSV202419)、上海市柔性医疗机器人重点实验室开放课题(SKLFMR-101)等项目的支持。
论文信息:
Boyu Liu, Lizhi Zhang, Ben Wang, Jianning Ding, Lin Xu*. Autonomous soft robotics: Revolutionizing motion with intelligence and flexibility. Advances in Colloid and Interface Science, 2026, 103911.
https://doi.org/10.1016/j.cis.2026.103911